共享内存
目录
共享内存¶
异步调度器接受任何 concurrent.futures.Executor 实例。这包括 Python 标准库中定义的 ThreadPoolExecutor 和 ProcessPoolExecutor 实例,以及任何第三方库中的其他子类。Dask 还定义了自己的 SynchronousExecutor,它只是在主线程上运行函数(对调试很有用)。
完整的 dask get 函数分别存在于 dask.threaded.get、dask.multiprocessing.get 和 dask.get 中。
策略¶
异步调度器维护索引数据结构,用于显示哪些任务依赖于哪些数据,哪些数据可用,哪些数据正在等待哪些任务完成才能释放,以及哪些任务当前正在运行。它可以在相对于总任务数和可用任务数的常数时间内更新这些信息。这些索引结构使得 dask 异步调度器可以在单台机器上扩展到非常多的任务。
为了保持内存占用小,我们选择将可运行任务保存在后进先出堆栈中,以便最近变得可用的任务获得优先权。这鼓励在开始新链条之前完成相关任务链条。这也可以在常数时间内进行查询。
性能¶
总结一下 线程调度器的开销大致如下
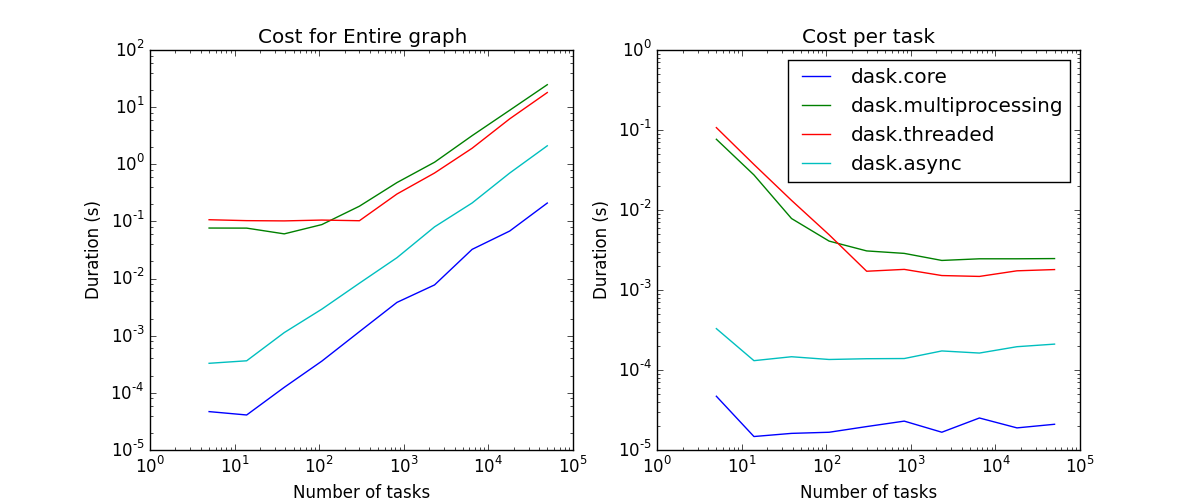
每个任务 200 微秒的开销
10 微秒的启动时间(如果您希望每次都创建一个新的 ThreadPoolExecutor)
随任务数量呈常数扩展
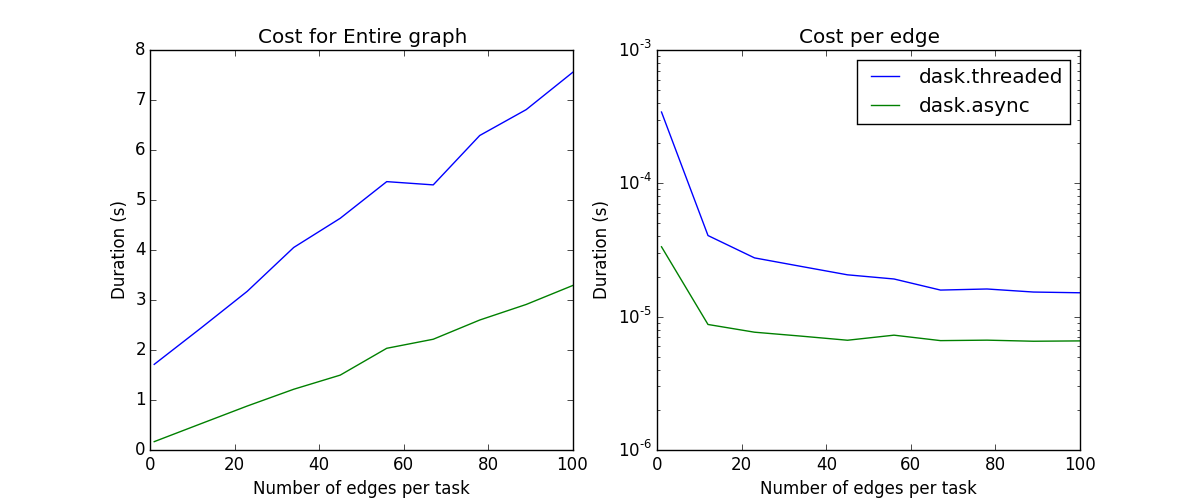
随每个任务的依赖数量呈线性扩展
调度器会引入开销。这种开销有效地限制了我们并行性的粒度。下面我们衡量了异步调度器在不同 apply 函数(线程、同步、多进程)以及不同负载(易并行、密集通信)下的开销。
最快/最简单的测试方法是使用 IPython 的 timeit 魔术命令
In [1]: import dask.array as da
In [2]: x = da.ones(1000, chunks=(2,)).sum()
In [3]: len(x.dask)
Out[3]: 1168
In [4]: %timeit x.compute()
148 ms +- 669 us per loop (mean +- std. dev. of 7 runs, 10 loops each)
所以每个任务大约需要 90 微秒。其中约 100 毫秒来自开销
In [5]: x = da.ones(1000, chunks=(1000,)).sum()
In [6]: %timeit x.compute()
1.67 ms +- 1.85 us per loop (mean +- std. dev. of 7 runs, 1,000 loops each)
每次启动一个 ThreadPoolExecutor 会有一些开销。这可以通过使用全局或上下文池来缓解
>>> from concurrent.futures import ThreadPoolExecutor
>>> pool = ThreadPoolExecutor()
>>> dask.config.set(pool=pool) # set global ThreadPoolExecutor
or
>>> with dask.config.set(pool=pool) # use ThreadPoolExecutor throughout with block
... ...
现在我们测量任务数量扩展和图密度扩展


已知限制¶
共享内存调度器有一些显著的限制
它在单台机器上工作
线程调度器受到 Python 代码 GIL 的限制,因此如果您的操作是纯 Python 函数,您不应该期望多核加速
多进程调度器必须在工作进程之间序列化函数,这可能会失败
多进程调度器必须在工作进程和中心进程之间序列化数据,这可能会很昂贵
多进程调度器无法在工作进程之间直接传输数据;所有数据都通过主进程路由。